Past Projects
I worked on several AI and robotics projects when I was in academia; I've highlighted a few of them below.
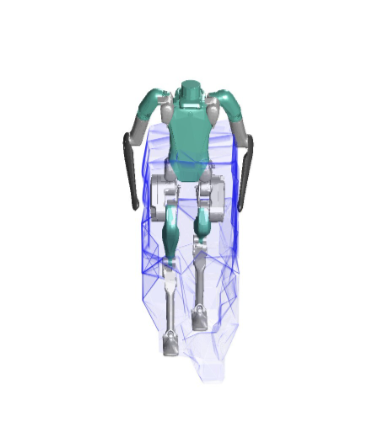
Task and Motion Planning for Mobile Manipulation
With the Progress Lab at Michigan, I worked on approaches to do task and motion planning for mobile manipulation with the Digit humanoid robot.
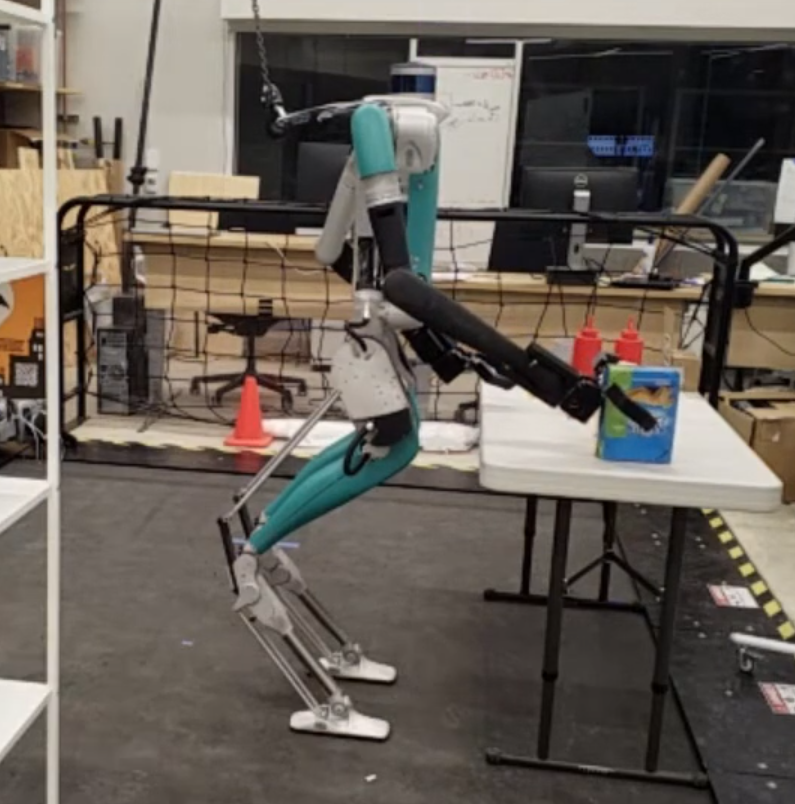

Legged Locomotion
Most recently, I spent a year working on legged locomotion for the Digit bipedal humanoid robot with the ROAHM Lab at Michigan. I can't say too much about these yet since they're still in the process of being published, but I'll update their pages when they're out.

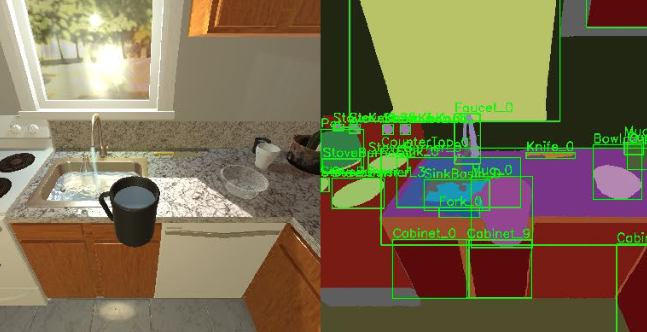
Natural Language for Embodied AI
I've worked on a few projects related to embodied AI with the SLED Group at Michigan. These projects were focused on the ability of agents in home environments to follow natural language instructions in conjunction with perception and planning.

Representation Learning for Robotics
I've done some work on representation learning for robotics as well.